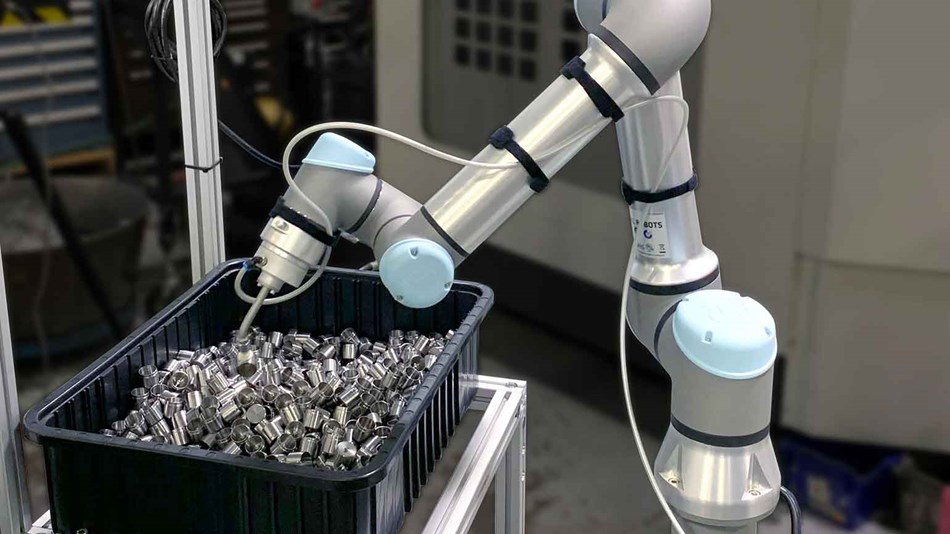
Bin selection is the process of automation where disordered objects are detected, picked up and delivered using robots and 3D sensors. Stationary mounted on top of the container; the sensor first creates a point cloud using structural light. A three-dimensional model of the surface is created by this. Robots can detect the surfaces, holes or grooves of the smallest components and reliably grasp them.
3D Sensors:
3D sensors test three-dimensional completeness, dimension accuracy and level. They enable robot control, for example in pick and place or bin picking applications. The 3D sensor project made light patterns that are recorded and digitized as 3D point clouds using camera.
Sensory abilities will enhance the functional range of robots. Robots can only repeat reprogrammed tasks without feeling the outside world. Thus, the work is very hard; such a system cannot exist to overcome any small worries. Sensory ability is an essential component of a flexible robot.
Maybe the most important type of vision is Robotic sensors. Because the vision sensor is a non-contact sensor. Information can be retrieved without disturbing the environment.
There are basically three where vision opinion can play important role:
- Finding and locating the targeted object and grip points.
- Bring the object from its starting point to a destination while avoiding collisions with other items.
- Assemble an object using an object.
Robotic Automation for Bin Picking:
In today’s manufacturing environment, the availability of good wages is always low. Automatic simple repeating machine is a great place to start maintenance, as it frees up existing labor for high value tasks.
Any application where the parts have to go through the multi-step process and have to be placed in a box between the steps is ideal for use in robotics and automation. It is commonly found in the plastic injection molding, automotive and medical device manufacturing industries. These jobs are mundane and repetitive, and are not an efficient use of human operators. Furthermore, such actions can lead to carpal tunnel or other physical injuries as their recurrence is natural.
At present, bin picking is a fully automated system integration project, which requires a number of advanced technologies to work together. These includes:
- A 3D model of the part, bin, infector, robot, space target and any environmental barriers.
- Model of one or more ways to participate with the end effector and submit it to the placement target.
- A 3D sensor for mapping the bin.
- Image analysis software to find potential obstacles in each part and box.
- Path planning software to find a collision free route from section pick up point to placement target.
- Robot control software’s for robot infectives, and partitions along the way.
These systems combine a 3D sensor with image analysis software that runs on a separate computer. A robotic expert is expected to combine sensors, separate computers, separate software and robot controllers, and then write a program to retrieve the location of each part and find out how to reach the placement goal.

{kind=link}